3.5.6. Određivanje matrica varijabli stanja iz matrične impulsne prijenosne funkcije – viševeličinski sustav
Kod viševeličinskih sustava situacija je dosta složenija. Ovdje ćemo navesti samo postupak koji se odnosi na matričnu impulsnu prijenosnu funkciju koja nema višestrukih polova, što je u praksi česta pojava. Za općeniti slučaj čitaoca upućujemo na literaturu (npr. J.A. Borrie, Modern Control Systems, A Manual of Design Methods, Prentice Hall, 1986).
Dobivena realizacija je i osmotriva i upravljiva. Postupak je relativno jednostavan i sastoji se od 5 koraka:
1. Izračunati W(∞)
2. Pronaći Wr(z) = W(z)-W(∞)
3. Izraziti Wr(z) u obliku:
 (3.5.36)
(3.5.36)
gdje su λ1 do λn svi polovi od Wr(z).
4. Rastaviti (dekompozirati) matrice Mi u oblik
![]() (3.5.37)
(3.5.37)
gdje je Li vektor, a Ni jednoredna matrica.
5. Matrice varijabli stanja su
 (3.5.38)
(3.5.38)
Primjer:
Zadana je matrična impulsna prijenosna funkcija
Polovi se nalaze u točkama
![]()
pa dalje slijedi
gdje su vektori residuumi prijenosnih funkcija. Dalje radimo njihovu dekompoziciju na vektore L i jednoredne matrice Ni koje su u ovom slučaju veličine 1x1:
pa je
Slika 3.5.7 prikazuje odzive sustava za opis varijablama stanja i opis impulsnom prijenosnom funkcijom. Odzivi su identični.
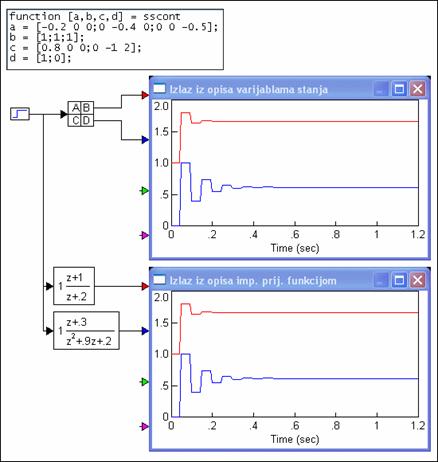
Slika 3.5.7. Odzivi sustava opisanog varijablama stanja
izvedenog iz matrične impulsne prijenosne funkcije za T=0.05
(varijable_stanja_prelaz
_iz_impulsne.vsm)