3. MODELIRANJE DISKRETNIH SUSTAVA
Slična je situacija i kod diskretnih sustava s tim da se oni nastoje opisati linearnim jednadžbama diferencija s konstantnim koeficijentima. Iz jednadžbi diferencija jednostavno se izvede i tzv. impulsna prijenosna funkcija na kojoj se temelji "klasični" pristup analizi i sintezi diskretnih sustava ili jednadžbe stanja diskretnih sustava na kojima se temelje neke "modernije" metode.
Uzmimo za primjer sustav integracijskog ponašanja vođen proporcionalnim regulatorom prikazan na slici 3.1. Tipičan primjer je spremnik bez ispusta. Uz zanemarenje nelinearnosti ventila i ograničene visine spremnika (maksimalne vrijednosti koju razina može doseći prije preljevanja) možemo ga opisati sustavom jednadžbi:

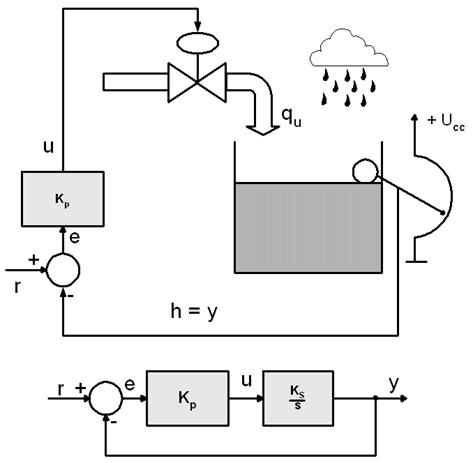
Slika 3.1. Integracijski sustav vođen proporcionalnim regulatorom
Iz ovih jednadžbi slijedi linearna diferencijalna jednadžba prvog reda koja matematički opisuje ponašanje ovog kontinuiranog regulacijskog sustava:
![]() (3.1)
(3.1)
Rješenje jednadžbe predstavlja vremensku ovisnost promjene izlazne varijable (razine u spremniku) u ovisnosti o početnoj razini (početni uvjet) y(0) i vremenskoj promjeni ulazne, referentne veličine r(t) :
 (3.2)
(3.2)
Za nulte početne uvjete (prazan spremnik) i skokovitu jediničnu promjenu referentne vrijednost (skokovita pobuda) rješenje jednadžbe (3.2) je:
 (3.3)
(3.3)
Prikazuje ga slika 3.2 za Kp=10, Ks=1, odnosno K = Kp Ks =10.
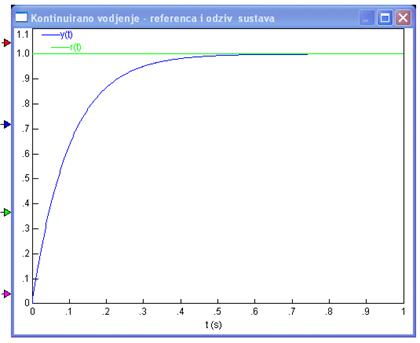
Slika 3.2. Odziv regulacijskog sustava sa slike 3.1 na skokovitu pobudu
Zamijenimo li kontinuirani regulator diskretnim i ostavimo Ks = 1, biti će K=Kp (slika 3.3).
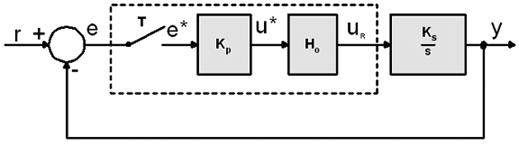
Slika 3.3. Integracijski sustav vođen diskretnim proporcionalnim regulatorom
Slika 3.4. prikazuje sve signale za skokovitu pobudu reference i period uzorkovanja T=0.02.
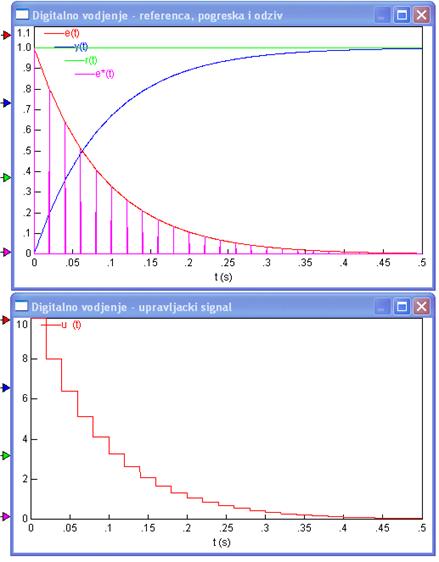
Slika 3.4. Signali integracijskog sustava sa slike 3.3 vođenog diskretnim proporcionalnim regulatorom za T=0.02
Zanimljivo je pogledati što se događa između trenutaka kT i (k+1)T. Situaciju povećano prikazuje slika 3.5.
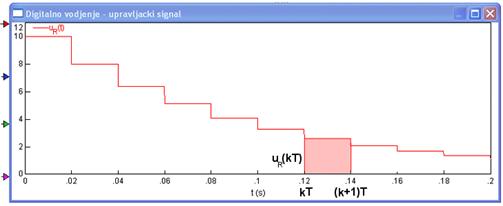
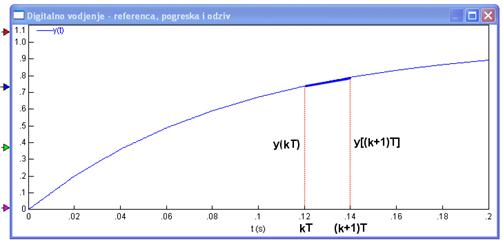
Slika 3.5. Povećani upravljački signal i odziv sustava vođenog diskretnim proporcionalnim regulatorom
Vođeni je sustav čisti integrator pa vrijedi :
 (3.4)
(3.4)
U trenutku t=(k+1)T vrijednost integrala y[(k+1)T] bit će jednaka vrijednosti integrala u prethodnom trenutku y(kT) plus površina pravokutnika čije su stranice uR(kT) i period uzorkovanja T:
![]() (3.5)
(3.5)
Kako je
![]()
i ako produkt konstanti označimo sa K = KP KS vrijedi:
![]() (3.6)
(3.6)
Nakon sređivanja i dijeljenja s periodom
uzorkovanja T dobijemo:
 (3.7)
(3.7)
Usporedimo li jednadžbu (3.7) i (3.1)
uočit ćemo dosta sličnosti. Razlika je što se umjesto vremena t javljaju
diskretni vremenski trenuci kT, te umjesto prve derivacije
![]() oblik
oblik ![]() koji nazivamo prva diferencija ili još
točnije prva unaprijedna diferencija. Cijela se jednadžba
(3.7) zbog toga naziva linearna jednadžba diferencija prvoga reda.
koji nazivamo prva diferencija ili još
točnije prva unaprijedna diferencija. Cijela se jednadžba
(3.7) zbog toga naziva linearna jednadžba diferencija prvoga reda.
Prva unaprijedna diferencija kraće se piše:
 (3.8)
(3.8)
pa jednadžba (3.7) izgleda:
![]() (3.9)
(3.9)
i opisuje ponašanje diskretnog regulacijskog sustava sa slike 3.3.