Podešavanje parametara PID regulatora postupkom reakcijske krivulje
Originalni postupak također su dali Ziegler i Nichols kao postupak primjenjiv u slučajevima kada se može snimiti odziv samog sustava koji se vodi na skokovitu pobudu, pa se često naziva postupak s otvorenom petljom. U engleskom govornom području susreće se pod nazivom Reaction Curve Method ili Step-response Method.
Zeigler i Nichols su je primjenjivali i na:
a) sustave s izjednačenjem, koje nazivamo i samoregulacijski sustavi, ne-integracijski sustavi, sustavi 0-te vrsti (nemaju polova u ishodištu s ravnine) i na
b) sustave bez izjednačenja, koje nazivamo i ne-samoregulacijski sustavi, integracijski sustavi ili sustavi ne-nulte vrsti sustave (imaju polova u ishodištu s ravnine),
dok su se Cohen i Coon, čiji tablice navodimo kasnije, ograničili samo na sustave s izjednačenjem.
U svim slučajevima ukoliko se radi o sustavu s izjednačenjem, vođeni dio sustava se aproksimira prijenosnom funkcijom prvog reda s kašnjenjem:
 (5.1.55)
(5.1.55)
Postupak podešavanja se sastoji u snimanju odziva otvorenog sustava na skokovitu pobudu, određivanjem vrijednosti Km, L i τ, te proračun parametara PID regulatora prema Zeigler-Nicholsovoj tablici, ovisno o kojem se tipu regulatora radi. Primjer odziva s označenim parametrima prikazuje slika 5.1.27, a parametri su dani u tablici 5.5. Tablica je primjenjiva i na sustave s izjednačenjem i na sustave bez izjednačenja.
Slika 5.1.27. Definicija parametara na odzivu otvorenog sustava na jediničnu skokovitu pobudu
|
|
K |
Ti |
Td |
|
P |
τ/ Km L |
- |
- |
|
PI |
0.9 τ/ Km L |
3.33 L |
- |
|
PID |
1.2 τ/ Km L |
2 L |
0.5 L |
Tablica 5.5. Podešavanje parametara kontinuiranog PID regulatora Zeigler - Nicholsovim postupkom reakcijske krivulje (eng. Reaction Curve Method)
Neki od autora dopuštaju da odziv otvorenog sustava bude i oscilatorno prigušen te da se parametri Km, L i τ odrede na isti način.
Pogledajmo primjer prijenosne funkcije drugog reda na koju nismo mogli primijeniti postupak stabilnosne granice.
Primjer:
Za sustav prijenosne funkcije 1.68/(.231s2+1.3s+1) odredi optimalne parametre podešavanja PID regulatora metodom reakcijske krivulje.
Slika 5.1.28 pokazuje odziv sustava na jedinični skok.
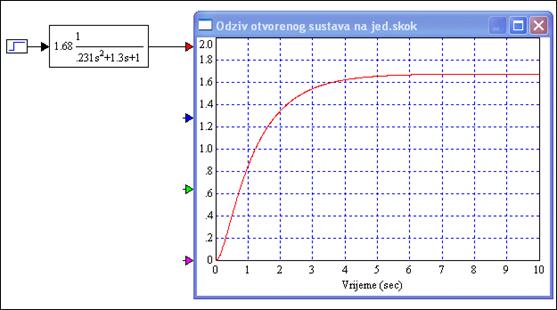
Slika 5.1.28. Odziv otvorenog sustava na jedinični skok
Koristeći opciju 'Read Coordinates...' na odzivu smo izmjerili Km = 1.68, τ = 1.245 i L=0.15, pa su Zeigler-Nicholsove vrijednosti parametara PID regulatora:
K = 1.2 τ/ Km L = 5.928
Ti = 2 L = 0.3
Td = 0.5 L = 0.075
Slika 5.1.29 prikazuje odziv sustava vođenog PID regulatorom s ovako podešenim parametrima
Slika 5.1.29. Sustav vođen kontinuiranim PID regulatorom kojem su parametri određeni metodom reakcijske krivulje (PID-podesavanje_parametara-reakcijska_krivulja.vsm)
I drugi su autori predlagali svoje tablice podešavanja PID regulatora i svaki je imao određeno opravdanje zašto predlaže baš takve vrijednosti. Kao primjer navodimo način proračuna parametara po postupku Chien – Hranes – Resewicha. Oni prave razliku između PID regulatora u zadacima stabilizacije i u zadacima slijednog vođenja. Drugi je primjer isto tako klasični postupak Cohen – Coona i postupci temeljeni na minimizaciji integralnih kriterija kvalitete odziva.
Stabilizacijsko vođenje
|
|
K |
Ti |
Td |
|
P |
0.7 τ/ Km L |
- |
- |
|
PI |
0.7 τ/ Km L |
2.3 L |
- |
|
PID |
1.2 τ/ Km L |
2 L |
0.42 L |
Slijedno vođenje
|
|
K |
Ti |
Td |
|
P |
0.7 τ/ Km L |
- |
- |
|
PI |
0.6 τ/ Km L |
τ |
- |
|
PID |
0.95 τ/ Km L |
1.36 τ |
0.47 L |
Tablica 5.6. Podešavanje parametara kontinuiranog PID regulatora prema Chien – Hranes – Resewichu (K.L. Chien, J.A. Hrones, I.B. Reswich, On the Automatic Control of Generalized Passive Systems, Transaction ASME, 74, 1952)
Snimljeni odziv treba biti granično aperiodički a
parametri su određeni uz pretpostavku da nadvišenje ne pređe 20%. Razlika je
u podešavanju parametara između stabilizacijskog i slijednog vođenja
Tablica 5.7
prenosi još jedan od klasičnih načina podešavanja PID regulatora po
Cohen-Coonu uvedenog
1953. godine (G.H. Cohen, G.A. Coon, Theoretical
consideration of retarded control, Trans.ASME, Vol.75, pp. 827-834, 1953). Proračun parametara regulatora vezan je s padanjem amplituda prigušenih
oscilacija. U odzivu vođenog sustava drugo nadvišenje bi trebalo biti 25%
prvog nadvišenja (omjer druge i prve amplitde oscilacija u engleskoj
literaturi se naziva subsidence ratio i on u slučaju
Cohen-Coonovog podešavanja iznosi 1/4 ).
|
|
K |
Ti |
Td |
|
P |
|
- |
- |
|
PI |
|
|
- |
|
PID |
|
|
|

Tablica 5.7. Podešavanje parametara kontinuiranog PID regulatora prema Cohen-Coonu.
Primjer:
Za prethodni primjer ostali načini podešavanja uz Km = 1.68, τ = 1.245 i L=0.15 daju sljedeće rezultate:
Stabilizacijski Chien – Hranes – Resewich
K = 5.928
Ti = 0.3
Td = 0.63
Slijedni Chien – Hranes – Resewich
K = 4.693
Ti = 1.6932
Td = 0.0705
Cohen-Coon
K = 6.736
Ti = 0.3515
Td = 0.05337
Slika 5.1.30 prikazuje odzive sustava vođenog kontinuiranim PID regulatorom za različite načine podešavanja parametara PID regulatora.
Slika 5.1.30. Sustav vođen kontinuiranim PID regulatorom kojem su parametri određeni metodom reakcijske krivulje na sva četiri opisana načina (PID-podesavanje_parametara-reakcijska_usporedba.vsm)
Svi su odzivi vrlo slični osim za slijedno Chien – Hranes – Resewichovo podešavanje, kada je odziv nešto sporiji, ali je zato bez prebačaja što je poželjnije u slijednom režimu rada sustava vođenja.
Y. Takahashi sa suradnicima (Y. Takahashi CM.J. Rabins, D.M. Auslander, Control and Dynamic Systems, Addison Wesley, 1970) napravio je modifikaciju originalnog Zeigler – Nicholsovog postupka primjenjivu za digitalno vođenje uzevši u obzir i period uzorkovanja. Vrijednosti njegovih parametara za postupak reakcijske krivulje dane su u tablici 5.8 (Napomena: Pazite parametri regulatora se i ovdje navode za idealno paralelnu formu PID regulatora).
|
|
K |
Ki =K/Ti |
Kd =KTd |
|
P |
|
- |
- |
|
PI |
|
|
- |
|
PID |
|
|
|

Tablica 5.8. Podešavanje parametara diskretnog PID regulatora postupkom reakcijske krivulje (eng. Reaction Curve Method)
Ponovimo prethodni primjer sada za diskretni regulator.
Primjer:
Uz period uzimanja uzoraka T=0.1 i Km = 1.68, τ = 1.245 i L=0.15 parametri diskretnog PID regulatora po Takahashiu trebali bi biti:
Ki = 1.1116
K = 3.001
Kd = 3.705
Prebacimo to u konstante paralelne realizacije:
K = 3.001
Ti = K/ Ki = 2.6997
Td = Kd /K= 1.2346
Slika 5.1.31 prikazuje odzive sustava vođenih diskretnim regulatorom (s obje modifikacije, ali bez zasićenja izvršnog uređaja) za vrijednosti parametara proračunate originalnom Ziegler-Nicholsovom metodom za kontinuirane sustave i Takahshievom metodom i uspoređuje ih s odzivom kontinuiranog regulatora. Diskretni regulator za Zeigler-Nicholsovo podešavanje parametara ima čak bolji odziv od kontinuiranog, a zanimljivo je Takahashieva metoda u ovom primjeru daje odziv bez prebačaja.
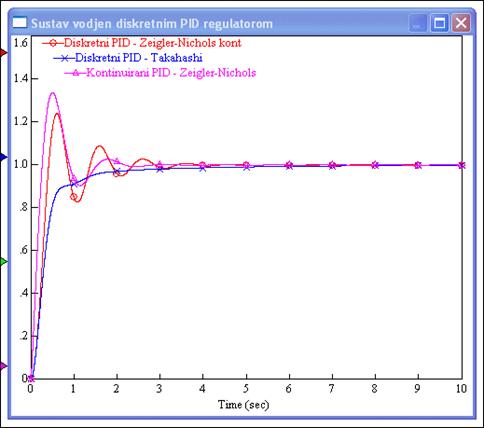
Slika 5.1.31. Usporedba odziva sustava vođenih kontinuiranim i diskretnim regulatorom (s obje modifikacije, ali bez zasićenja izvršnog uređaja) za vrijednosti parametara proračunate metodom reakcijske krivulje originalnom Ziegler-Nicholsovom metodom i Takahshievom metodom (PID-podesavanje_parametara-reak_krivulja_diskretni.vsm)