5.2. Projektiranje regulatora u diskretnom području
Diskretizacijom kontinuiranih regulatora samo nastojimo diskretnim regulatorom što vjernije oponašati djelovanje kontinuiranog regulatora. Digitalna izvedba kontinuiranih regulatora samo je još jedan od mogućih načina realizacije kontinuiranih regulatora. Pri tome se neka od svojstava koje digitalno vođenje može unijeti u krug vođenja ne mogu koristiti zato što se projektiranje (sinteza) regulatora radi u kontinuiranom području. Još ranih 50-ih godina istraživači diskretnog vođenja su utvrdili da bi primjerenije bilo i postupak projektiranja regulatora prebaciti u diskretno područje ( A.R. Bergen, J.R. Ragazzini, Sampled-Data Processing Techniques for Feedback Control Systems, Trans AIEE, pp. 236-247, Nov. 1954). Iako uvedeni još 50-ih godina ovi postupci procvat doživljavaju u 60-im i posebno 70-im godinama kada je masovna proizvodnja ručnih računala oborila cijenu sklopova, pa se digitalno vođenje počelo masovno primjenjivati. Digitalni je regulator postao sastavni dio kruga vođenja što se i naglasilo pojmom direktno digitalno vođenje (DDC – eng. Direct Digital Control), a nije samo davao postavne vrijednosti. U skladu s tim nazivom možemo i postupke projektiranja regulatora u diskretnom području nazvati direktna digitalna sinteza (DDS – eng. Direct Digital Synthesis).
Dva su temeljna pristupa direktnoj digitalnoj sintezi. Prva se sastoji u podešavanju polova (i nula) diskretnog regulatora, kako bi se vođeni sustav ponašao u skladu s postavljenim specifikacijama. Jednostavniji oblik postupka temelji se na postavljanju polova i nula regulatora u geometrijskom mjestu korijena i mijenjanjem njihovog položaja dok GMK vođenog sustava ne prođe kroz točku u z ravnini definiranu željenim specifikacijama (eng. Design by Root Locus). Složeniji oblik postupka temelji se na željenoj impulsnoj prijenosnoj funkciji vođenog sustava i manipulaciji polinomima u z području. Ovaj se postupak u engleskoj literaturi naziva 'Pole-Placement Method'. Postupak se može primijeniti i ukoliko je vođeni sustav opisan impulsnom prijenosnom funkcijom i varijablama stanja.
Drugi se postupak temelji na željenim karakteristikama odziva zatvorenog regulacijskog sustava, na primjer dolazak do konačne vrijednosti u predefiniranom broju diskretnih trenutaka (eng. Finite-Time Settling Control). Sva tri postupka izučavati ćemo u nastavku.
Uobičajeni način uključivanja diskretnog regulatora u krug vođenja je uključivanje u serijsku, direktnu granu između komparatora i sustava koji se vodi, ali se kod postupka projektiranja regulatora podešavanjem polova diskretni regulator razbije u dva dijela koja se postavljaju ispred komparatora. Jedan od njih se nalazi u serijskoj grani i označava s GCS(z), a drugi u povratnoj grani i označava s GCP(z). Sličan način podjele regulatora susreli smo i na primjeru modifikacija PID regulatora. Standardna i modificirana shema vođenja prikazana je na slici 5.2.1.
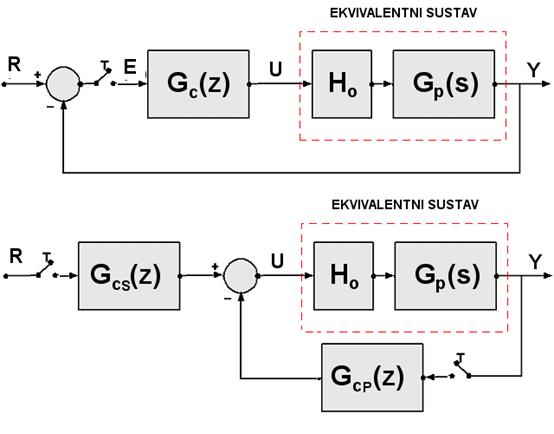
Slika 5.2.1. Sustav vođenja kod kojeg je diskretni regulator uključen u serijsku granu sustava i sustav vođenja kod kojega je regulator podijeljen u dio u direktnoj grani i dio u povratnoj grani
Impulsna prijenosna funkcija zatvorenog regulacijskog sustava je
 (5.2.1)
(5.2.1)
gdje je GE(z) impulsna prijenosna funkcija ekvivalentnog sustava - serijskog spoja sustava koji se vodi (koji uključuje i izvršne uređaje, filtre i senzore) i sklopa za obnavljanje 0-tog reda. Zadatak nam je odrediti impulsnu prijenosnu funkciju regulatora GC(z) tako da vođeni, zatvoreni regulacijski sustav zadovoljava određene zahtjeve koje projektant postavlja.