Treptanje (ili zvonjenje) upravljačkog signala
Razlog su polovi regulatora na negativnom dijelu realne z osi. Jedan od njih je sigurno pol u točki z1= -C1/ C2 = - 0.41179, ali i u polinomu trećeg reda u nazivniku regulatora postoje polovi na negativnom dijelu z osi. Pogledajmo to detaljnije.
U općem slučaju u nazivniku jednadžbe regulatora postoji polinom (N+1)-og reda
![]() (5.2.33)
(5.2.33)
koji je u našem konkretnom primjeru za N=2 polinom trećeg reda:
 (5.2.34)
(5.2.34)
Očito je da samo dio
![]() može imati polove na negativnom dijelu realne z osi.
može imati polove na negativnom dijelu realne z osi.
Dahlin je predložio da se ovaj problem riješi na način da se dijelovima koji mogu imati problematične polove varijabla z zamijeni vrijednošću 1 što znači da jednadžba regulatora postaje:
 (5.2.35)
(5.2.35)
Za neku
drugu vrijednost cjelobrojnog koeficijenta kašnjenja N polinom (N+1)-og reda
se zamijeni koeficijentom ![]() , pa jednadžba regulatora glasi
, pa jednadžba regulatora glasi
 (5.2.36)
(5.2.36)
Primjer:
Za prethodni primjer uvedite Dahlinovu korekciju polova koji uzrokuju pojavu treptanja upravljačkog signala.
Impulsna prijenosna funkcija uz korekciju treptanja za λ=1 glasi

a za λ=0.5:

Regulator je klasičnog tipa regulatora s faznim zaostajanjem (PI tipa), s obzirom da mu se nula nalazi lijevo od pola.
Slika 5.2.22 prikazuje odzive za oba slučaja i situaciju kada se temperatura koja se ustalila na vrijednosti 900C treba smanjiti na 800C. Prikazan je i upravljački signal za oba slučaja.
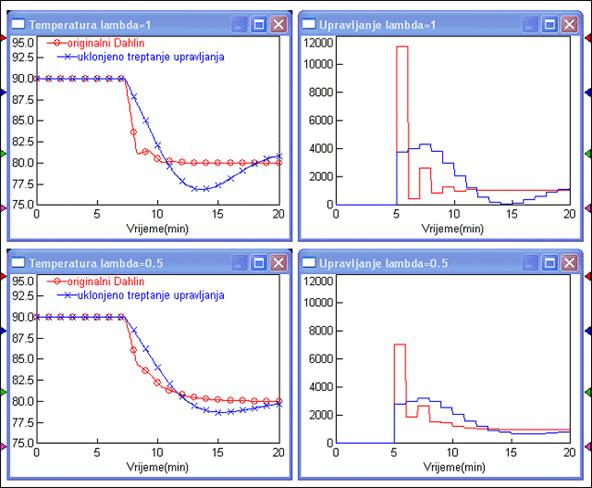
Slika 5.2.22. Rezultati primjene Dahlinovog regulatora kod kojeg je ispravljena pojava treptanja za λ=1 i λ=0.5 (sinteza-Dahlin2.vsm)
Odziv više nije aperiodički, kakav smo definirali željenim modelom, ali zato u upravljanju više nema pojave treptanja. Upravljanje se mijenja u puno manjim koracima.
Poseban problem su vrijednosti upravljačkog signala. Prije uklanjanja pojave treptanja za λ=1 u prvom diskretnom trenutku vrijednost upravljačke varijable je trebala biti preko 11.000 l/min u odnosu na stacionarnu vrijednost za 900C, što se naravno u praksi i ne može realizirati. Ovakav način projektiranja vođenja kod kojeg ne uzimamo u obzir ograničenja upravljačke varijable je u stvari nerealna. Svaka upravljačka varijabla ima granice unutar kojih se može mijenjati. U slučaju protoka donja apsolutna granica protoka je 0 l/min, a gornja granica neki maksimalni protok, tako da su maksimalna odstupanja u odnosu na stacionarnu vrijednost sigurno unutar ovih granica. Realno bi bilo u seriji sa serijskim regulatorom na slici 5.5.21 dodati nelinearni blok zasićenja ili saturacije, ali tada vođenje iz linearnog prelazi u nelinearno, što znatno komplicira postupke projektiranja regulatora, te prelazi okvire ovog kolegija. Čitatelje upućujemo na literaturu uz napomenu da je ovaj problem u engleskoj literaturi prisutan pod pojmom "control with constrains on control variable (or plant input)".