Podešavanje PI i PID regulatora korištenjem Dahlinovog postupka
U praktičnoj je upotrebi još uvijek veliki broj regulatora tipa PI i PID, kako u kontinuiranoj, tako i u digitalnoj izvedbi. Dahlinova sinteza je idealna polazna osnova na kojoj se može razraditi postupak podešavanja parametara ovih regulatora uz čije će se vođenje sustav ponašati kao da ga vodi Dahlinov regulator (K-C. Chiu, A.B. Corripio, C.L. Smith, Digital Control Algorithms, Part III – Tuning PI and PID Controllers, Inst. And Control Systems, pp. 41-43, Dec. 1973).
Za PI regulator polazna je osnova impulsna prijenosna funkcija regulatora koji se dobije modeliranjem vođenog dijela sustava prijenosnom funkcijom prvog reda s kašnjenjem uz eliminaciju treptanja:
 (5.2.44)
(5.2.44)
Jedan od oblika jednadžbe diskretnog PI regulatora je
 (5.2.45)
(5.2.45)
Postupak se sastoji u tome da se nastoji (5.2.44) napisati u obliku koji je usporediv s jednadžbom (5.2.45)
 (5.2.46)
(5.2.46)
pa usporedbom (5.2.45) i (5.2.46) nakon sređivanja dobijemo:
 (5.2.47)
(5.2.47)
Primjer:
Ponovimo primjer egzotermičkog reaktora vođenog PI regulatorom za različite vrijednosti parametra λ. Za λ=0.2 sustav prikazuje slika 5.2.25.
Slika 5.2.25. Sustav vođen diskretnim PI regulatorom podešenim Dahlinovim postupkom za λ=0.2
PI regulatori imaju sljedeće parametre (T=1, N=2, τ=11.55, K=-0.0103):
Slika 5.2.26 prikazuje odzive i upravljačke signale
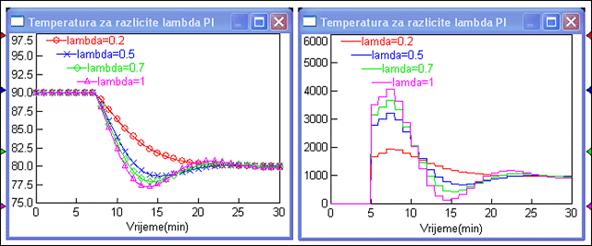
Slika 5.2.26. Odziv sustava vođenog PI regulatorima podešenim Dahlinovim postupkom za različite vrijednosti parametra λ (sinteza-Dahlin-PI.vsm)
Dahlin je i za ovaj slučaj predložio ublažavanje treptaja upravljačke veličine zamjenom polova na lijevoj strani realne osi z ravnine konstantama.
Ukoliko nastavljamo povećavati λ, odziv postaje sve brži. U graničnom slučaju kada λ teži u beskonačno Dahlinov regulator poznat po nazivu 'deadbeat' regulator ili regulator s 'deadbeat' odzivom. O njemu više u sljedećim poglavljima.
Za PID regulator polazna je osnova Dahlinova sinteza kod koje se vođeni sustav modelira prijenosnom funkcijom drugog reda s kašnjenjem i korekcijom treptanja, a konačni rezultat za diskretni PID regulator tipa
 (5.2.48)
(5.2.48)
su parametri:
 (5.2.49)
(5.2.49)
Napomena:
Pretpostavimo li da period uzorkovanja T teži nuli iz (5.2.47) i (5.2.49) mogu se izračunati konstante podešavanja kontinuiranih PI i PID regulatora uz čije vođenje će sustav imati Dahlinov odziv. Pri tome pretpostavljamo da je kašnjenje sustava koji se vodi jednako željenom kašnjenju vođenog sustava (NT=L). Rezultat za PI regulator jest:
 (5.2.50)
(5.2.50)
a za PID regulator:
 (5.2.51)
(5.2.51)
Postupak je zanimljiv zbog toga što se karakteristika odziva podešava samo mijenjanjem proporcionalnog dijela PID regulatora, podešavanjem faktora λ.
Svi diskretni regulatori koje smo do sada razmatrali temeljili su se na definiranju željenog modela ponašanja zatvorenog regulacijskog sustava. Model se najčešće definira u kontinuiranom području i tek se onda prebaci u z područje. Međutim postoji postupak projektiranja diskretnih regulatora kod kojega se i željeni rezultat vođenja definira u diskretnom području. O njemu govorimo u sljedećem poglavlju.