5.5.1.3. Određivanje matrice povratne veze varijabli stanja za 'dyadic' vođenje - viševeličinski sustav
Vođenje povratnom vezom varijabli stanja ‘dyadic’ tipa formira se tako da se signal varijabli stanja množi s produktom dvije matrice:
![]() (5.5.15)
(5.5.15)
- matrice N kao i u slučaju sustava s jednim ulazom jednoredna matrica reda 1 x n, i
- vektora M reda q x 1.
Produkt M N je matrica reda q x n. Vektor M se zadaje, a jednoredna matrica N se računa istim postupkom kao i kod sustava s jednim ulazom.
Pogledajmo primjer sustava čije su diskretne jednadžbe varijabli stanja

Željeni položaj polova u z području je
p1=-0.1, p2=-0.15, p3=0.1
Ostaje sada na neki način odrediti vektor M. Jedno od mogućih rješenja je staviti

To znači da su upravljačke sekvence linearno zavisne. Upravljačka veličina u1 je uvijek 3 puta veća od u2.
Rješavanje matrične jednadžbe (5.5.15) je
![]()
odnosno

Slika 5.5.14 prikazuje trajektorije varijabli stanja za početne uvjete x1(0)= x2(0)= x3(0)=1.
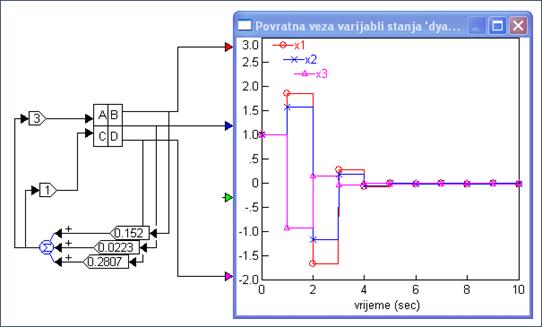
Slika 5.5.14. Trajektorije varijabli stanja za početne uvjete x1(0)= x2(0)= x3(0)=1