5.1.4.2. Primjer programske realizacije diskretnog PID regulatora
Digitalna implementacije PID regulatora temelji se na šest osnovnih koraka:
1. Čekanje signala sata kojim se definira period uzorkovanja.
2. Čitanje ulaznih vrijednosti: izlaza s A/D pretvarača i referentne vrijednosti izlaza iz memorije.
3. Proračun signala upravljanja.
4. Slanje signala upravljanja na D/A izlaz.
5. Postavljanje novih vrijednosti internih varijabli regulatora.
6. Odlazak na korak br. 1.
Osim toga obično se prije dolaska na korak br. 1 proračunaju sve konstante koje ovise o postavljenim vrijednostima regulatora.
U nastavku ćemo navesti kôd PID regulatora u pseudo-kôdu sličnom simulacijskim jezicima. Kôd se odnosi na algoritam kod kojeg je napravljena modifikacija derivacijskog člana, modifikacija toka signala, korekcija zasićenja i korekcija zbog promjene parametara tijekom vođenja (što detaljnije komentiramo iza koda), te aproksimacija integrala povratnim pravokutnim pravilom, a derivacije povratnom diferencijom. Polazna jednadžba je jednadžba diferencija
![]() (5.1.49)
(5.1.49)
i njoj pridružene jednadžbe za proračun pojedinih članova:
![]() (5.1.50)
(5.1.50)
 (5.1.51)
(5.1.51)
 (5.1.52)
(5.1.52)
 (5.1.53)
(5.1.53)
U skladu s tablicom 5.2 lako je napisati jednadžbe i za ostale oblike diskretizacije.
Program ima tri interna stanja – nI, nD i yold koja se ažuriraju u svakom diskretnom trenutku vremena. Navedimo najprije kod, a na kraju ćemo dati kratki komentar.
'PID regulator'
'Definicija varijabli'
r 'referentna veličina'
y 'izlazna (regulirana) veličina'
yold 'prethodna izlazna veličina'
u 'upravljanje prije zasićenja'
v 'upravljanje - izlaz regulatora'
P 'proporcionalni dio'
nI 'integracijski dio – interna varijabla'
nD 'derivacijski dio– interna varijabla'
t 'vrijeme'
INIT
'Početni uvjeti (računaju se samo na početku)'
nI=I0
nD=D0
u=u0
v=v0
'Početno postavljanje vrijednosti yold'
INPUT y
yold=y
'A može se i definirati neka početna vrijednost y0'
'Proračun konstanti (računa se samo kod promjene parametara)'
Kp=K*kR
Ki1=K*T/Ti
Ki2=K*kT
Kd1=Td/(Td+N*T)
Kd2=K*Td*N*T/(Td+N*T)
'Bumpless transfer – računa se samo kod promjene parametara'
nI=nI+Kold*(kRold*r-y)-Knew*(kRnew*r-y)
'Algoritam'
'Zabilježi vrijeme'
t=t
BEGIN
'Učitavanje ulaznih vrijednosti'
INPUT r
INPUT y
'Proporcionalni dio'
P=Kp*r-K*y
'Integracijski dio'
nI=nI+Ki1*(r-y)-Ki2*(u-v)
'U prvom koraku uzmu se početne vrijednosti upravljanja u i v, a nakon toga vrijednosti prethodnog trenutka što unosi određenu pogrešku'
'Derivacijski dio'
nD=Kd1*nD-Kd2*(y-yold)
'Proračun upravljanja'
u=P+nI+nD
v=IF u<ulow THEN ulow
ELSE IF u<uhigh THEN u
ELSE uhigh
OUTPUT v
'Novi parametri'
yold=y
'Čekaj dok prođe period uzorkovanja'
WAIT UNTIL t=t+T
REPEAT
'Parametri'
K=4.88 'konstanta pojačanja'
Ti=0.3 'vrem.konstanta integracijskog dijela'
Td=0.075 'vrem.konstanta derivacijskog dijela'
N=10 'konst.dodatnog derivacijskog pola'
kR=0.2 'dio reference koji ide kroz P član'
kT=0.1 'konst. korekcije integ. zasićenja'
ulow=0 'najmanja dopuštena vrij. upravljanja'
uhigh=1 'najveća dopuštena vrij. upravljanja'
T=0.1 'period uzorkovanja'
'Početne vrijednosti'
I0=0 'početna vrijednost integ. člana'
D0=0 'početna vrijednost deriv. člana'
u0=0 'početna vrijednost upravljanja'
v0=0 'početna vrijed. zasićenog upr.'
'Može biti zadan i početni y0'
Proračun
između oznaka INIT i BEGIN radi se samo jedan put i potrebno je ponoviti dio
iza 'proračun konstanti' samo ukoliko se promijene vrijednosti parametara
regulatora. Međutim ukoliko je kR različit od 1 tada
proporcionalni član (5.1.50) nije jednak nuli u stacionarnom stanju. Kako bi
se osiguralo da promjena parametara u trenutku kada se sustav nalazi u nekom
stacionarnom stanju ne uzrokuje nagle promjene u sustavu (u eng. govornom
području pojava se zove bumpless parameter change) treba se
nastojati da veličina I + P bude neovisna na promjene parametara, a to se
postiže tako da se trenutna zatečena vrijednost integracijskog dijela I
promjeni s novim I (Inovi) kojeg proračunamo jednadžbom:
![]() (5.1.54)
(5.1.54)
i već smo ga uključili u algoritam.
Sličan problem se javlja i kod komercijalnih PID regulatora kod prelaska iz automatskog načina rada u ručni. Komercijalni PID regulatori obično imaju dva režima rada automatski (Aut) i ručni (Man). Prijelaz iz jednog načina rada u drugi može se napraviti bilo kad tijekom vođenja sustava. Problem se može javiti ukoliko je regulator pozicijskog tipa s obzirom da integracijski dio ima neku akumuliranu vrijednost. Kod inkrementalnog oblika problem nije toliko značajan zato što je utjecaj prelaska s Aut na Man samo u jednom inkrementalnom ciklusu. Problem se naziva u eng. govornom području bumpless transfer i rješava se posebnim konstrukcijama PID regulatora. Slika 5.1.23 prikazuje simulaciju prednjeg panela industrijskog PID regulatora.
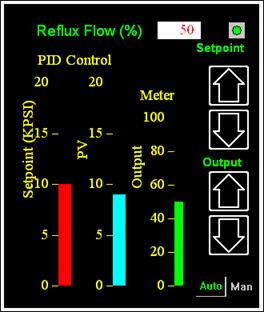
Slika 5.1.23.
Simulacija prednjeg panela industrijskog PID regulatora (Pidplate.vsm)