Podešavanje parametara PID regulatora postupkom stabilnosne granice
Prvi je
postupak primjenjiv za podešavanje parametara regulatora u zatvorenoj petlji
kada se petlja povratne veze ne smije prekidati. Zove se postupak
stabilnosne granice (eng. Ultimate Cycling). Postupak je
krajnje jednostavan. Regulator se prebaci u P mod (Ti se stavi
što veći, a Td jednak nuli). Konstanta pojačanja se lagano diže
dok se sustav ne dovede na granicu stabilnosti. Zabilježi se kritična
vrijednost pojačanja KKR i izmjeri perioda neprigušenih
oscilacija TKR. Parametri regulatora se podešavaju prema tablici
5.3.
|
|
K |
Ti |
Td |
|
P |
0.5 KKR |
- |
- |
|
PI |
0.45 KKR |
0.833 TKR |
- |
|
PID |
0.6 KKR |
0.5 TKR |
0.125 TKR |
Tablica 5.3 Podešavanje parametara kontinuiranog PID regulatora postupkom stabilnosne granice (eng. Ultimate Cycling Method)
Metoda daje zadovoljavajuće rezultate ukoliko se produkt kritičnog pojačanja i statičkog pojačanja samog sustava, koji je bezdimenzionalna veličina, kreće u granicama od 2 do 20. Ako se želi manji prebačaj vrijednosti sve tri konstante treba smanjiti. Na primjer na stranicama US Bureau of Reclamation u popratnim dokumentima programa PIDSim za simulaciju PID vođenja ustava i brana (http://www.usbr.gov/pmts/hydraulics_lab/twahl/pidsim/pidsim.html) daju se sljedeće vrijednosti podešavanja PID regulatora:
PID 1/4 omjera između prvog i sljedećeg prebačaja : K = 0.6 KKR, Ti = 1.2 TKR, T = 0.075 TKR
PID mali prebačaj: K = 0.33 KKR, Ti = 0.66 TKR, T = 0.11 TKR
PID bez prebačaja: K = 0.2 KKR, Ti = 0.606 TKR, T = 0.10 TKR
Ograničenje metode je to što sustav treba biti takav da se može dovesti na granicu stabilnosti. Na primjer sustav sa slike 5.1.9 je drugoga reda prijenosne funkcije 1.68/(.231s2+1.3s+1), pa je strukturno stabilan i ne može se samo povećanjem pojačanja dovesti na rub stabilnosti. Za njega će biti bolja druga metoda podešavanja parametara.
Ilustrirajmo postupak na primjeru sustava koji se može dovesti na rub stabilnosti.
Primjer:
Za sustav prijenosne funkcije 1/s(s+1)(s+2) odredi optimalne parametre podešavanja PID regulatora metodom stabilnosne granice.
Slika 5.1.24 prikazuje trenutak kada smo došli do kritičnog pojačanja.
Slika 5.1.24. Uz podešavanje parametara PID regulatora metodom stabilnosne granice (PID-podesavanje_parametara-stab_granica.vsm)
Sa slike smo očitali KKR =6 i TKR =4.45 sekundi, pa su prema tome optimalne vrijednosti parametara PID regulatora:
K = 0.6 KKR = 3.6
Ti = 0.5 TKR = 2.225
Td = 0.125 TKR = 0.55625
Slika 5.1.25 prikazuje odziv sustava vođenog PID regulatorom s ovako podešenim parametrima
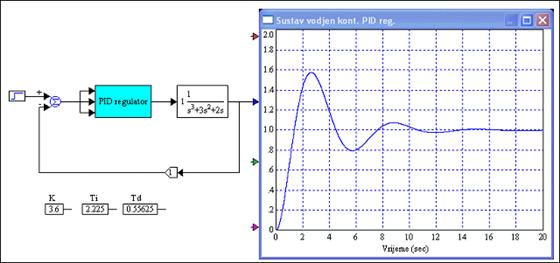
Slika 5.1.25. Sustav vođen kontinuiranim PID regulatorom kojem su parametri određeni metodom stabilnosne granice (PID-podesavanje_parametara-stab_granica.vsm)
Statičko pojačanje sustava je 1, kritično pojačanje 6, pa je ispunjena preporuka o produktu statičkog i kritičnog pojačanja.
Modifikaciju postupka primjenjivu za digitalno vođenje napravio je Y. Takahashi sa suradnicima ( Y. Takahashi CM.J. Rabins, D.M. Auslander, Control and Dynamic Systems, Addison Wesley, 1970) uzevši u obzir i period uzorkovanja. Vrijednosti njegovih parametara za postupak stabilnosne granice dane su u tablici 5.4 (Napomena: Pazite parametri regulatora se navode za idealno paralelnu formu PID regulatora).
|
|
K |
Ki =K/Ti |
Kd =KTd |
|
P |
0.5 KKR |
- |
- |
|
PI |
0.45 KKR– 0.5 Ki |
0.54 KKR T/TKR |
- |
|
PID |
0.6 KKR – 0.5 Ki |
1.2 KKR T /TKR |
0.075 KKR T /TKR |
Tablica 5.4. Podešavanje parametara diskretnog PID regulatora postupkom stabilnosne granice (eng. Ultimate Cycling Method)
Takahashi napominje i određene korekcije PID parametara ukoliko sustav ima veliko kašnjenje.
Ponovimo prethodni primjer sada za diskretni regulator.
Primjer:
Uz period uzimanja uzoraka T=0.1 (namjerno smo izabrali veći T od preporučenog kako bi se vidjelo da regulator i u tom slučaju radi) parametri diskretnog PID regulatora po Takahashiu trebali bi biti:
KKR =6
TKR =4.45
T=0.1
Ki = 1.2 KKR T /TKR = 0.1618
K = 0.6 KKR – 0.5 Ki = 2.0791
Kd = 0.075 KKR T /TKR = 0.01011
Prebacimo ove vrijednosti u konstante paralelne realizacije:
K = 2.0791
Ti = K/ Ki = 12.8498
Td = Kd /K= 0.00486
Slika 5.1.26 prikazuje odzive sustava vođenih diskretnim regulatorom (s obje modifikacije, ali bez zasićenja izvršnog uređaja) za vrijednosti parametara proračunate originalnom Ziegler-Nicholsovom metodom za kontinuirane sustave i Takahshievom metodom i uspoređuje ih s odzivom kontinuiranog regulatora. Upotrijebimo li originalne Ziegler-Nicholsove vrijednosti proračunate za kontinuirane sustave sustav vođen diskretnim regulatorom će biti nestabilan, dok Takahashijeva metoda daje nešto sporiji odziv, a iznos maksimalnog prebačaja ostaje isti kao kod vođenja kontinuiranim PID regulatorom podešenim Ziegler-Nicholsovom metodom.
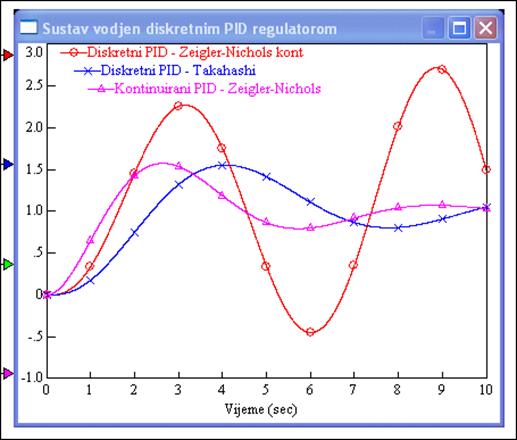
Slika 5.1.26. Usporedba odziva sustava vođenih kontinuiranim i diskretnim regulatorom (s obje modifikacije, ali bez zasićenja izvršnog uređaja) za vrijednosti parametara proračunate metodom stabilnosne granice originalnom Ziegler-Nicholsovom metodom i Takahshievom metodom (PID-podesavanje_parametara-stab_granica_diskretni.vsm)