4.2.1. Preslikavanje s ravnine u z ravninu
Prisjetimo se na početku da je s ravnina ravnina kompleksne frekvencije, a z ravnina ravnina funkcije kompleksne frekvencije.
Kompleksna frekvencija se definira kao s = σ + jω , pa su u s ravnini osi definirane realnim dijelom σ i imaginarnim dijelom jω kompleksne frekvencije. Varijabla z je funkcija kompleksne frekvencije
 (4.2.1)
(4.2.1)
pa se osi z ravnine označavaju kao Realna os i Imaginarna os.
Jednadžba (4.2.1) u potpunosti definira vezu između s ravnine i z ravnine.
Pogledajmo kako se neke karakteristične točke prebacuju iz s ravnine u z ravninu:
i)
![]()
ii) ![]()
Zaključak: Negativni dio realne osi s ravnine prebacuje se u realni odsječak između 1 i 0 z ravnine.
iii) 
iv) 
v) 
vi) 
Zaključak: Četiri karakteristične vrijednosti na imaginarnoj osi između 0 i j2π/T preslikavaju se u četiri točke z ravnine koje su na jediničnoj udaljenosti od središta. Lako je pokazati da se bilo koja točka između ovih vrijednosti preslikava na jediničnu kružnicu z ravnine. Ukoliko pređemo na sljedeći odsječak imaginarne osi, između točaka j2π/T i j2.(2π/T) on će se isto tako preslikavati u jediničnu kružnicu. Isto je i s intervalom između j2.(2π/T) i j3.(2π/T) itd. i s intervalima na negativnom dijelu imaginarne osi, pa je konačni zaključak da se imaginarna os s ravnine preslikava u jediničnu kružnicu z ravnine, s tim da je preslikavanje višeznačno s beskonačno točaka s ravnine u jednu točku z ravnine (preslikavanje je surjektivno, ali nije injektivno).
Vratimo li se natrag na jednadžbu (4.2.1) i uvrstimo odgovarajući s dobijemo
što je jednadžba jedinične kružnice u z ravnini sa središtem u ishodištu. Slika 4.2.1 prikazuje ovu situaciju grafički.
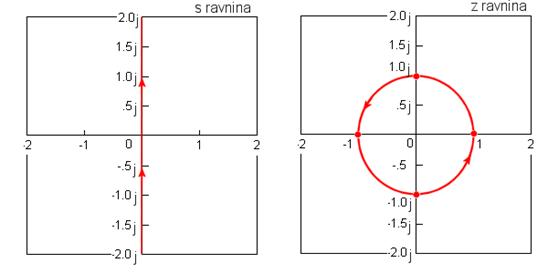
Slika 4.2.1. Preslikavanje imaginarne osi s ravnine u z ravninu
Pomaknemo li se lijevo u s ravnini prema (4.2.1) imamo
što je u z ravnini također kružnica, ali ovaj put radijusa eσT (vidi sliku 4.2.2).
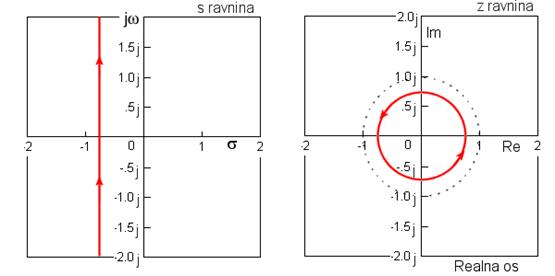
Slika 4.2.2. Preslikavanje pravca paralelnog s imaginarnom osi u z ravninu
Već smo prije spomenuli da se odsječak imaginarne osi između 0 i j2π/T=jωs preslikava u jediničnu kružnicu. Isto je i s odsječkom imaginarne osi od -jωs/2 do jωs/2. Pogledajmo sada detaljno kako se preslikava pojas u s ravnini omeđen odsječkom osi na imaginarnoj osi i polupravcima paralelnim s realnom osi od 0 do ∞ kao što prikazuje slika 4.2.3.
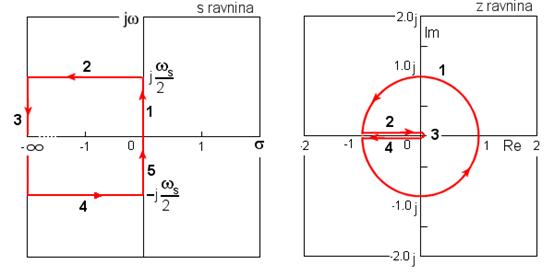
Slika 4.2.3. Preslikavanje pojasa s ravnine u z ravninu
Ovaj pojas s ravnine nazivamo osnovni pojas (eng. Primary Strip). Dio imaginarne osi od 0 do jωs/2 preslikava se u jediničnu polukružnicu u I i II kvadrantu z ravnine, polupravac paralelan s realnom osi od jωs/2 do - ∞ u dio realne osi z ravnine od -1 do 0, - ∞ se preslikava u ishodište z ravnine, polupravac paralelan s realnom osi od - ∞ do -jωs/2 u dio realne osi od 0 do - 1 i na kraju dio imaginarne osi od -jωs/2 do 0 u jediničnu polukružnicu z ravnine u III i IV kvadrantu. Unutrašnjost osnovnog pojasa preslikava se u unutrašnjost jedinične kružnice.
Na isti se način preslikava i bilo koji drugi jednako široki pojas s ravnine paralelan osnovnom pojasu.
Isti
način razmišljanja vrijedi i za pojaseve na
desnoj strani s ravnine, s tim da se oni
preslikavaju u područje izvan
jedinične kružnice z ravnine.
Zanimljivi interaktivni simulator
koji povezuje položaj polova sustava 2 reda
u s ravnini i z ravnini može se pronači na
adresi:
http://controlsystemsacademy.com/0003/0003.html
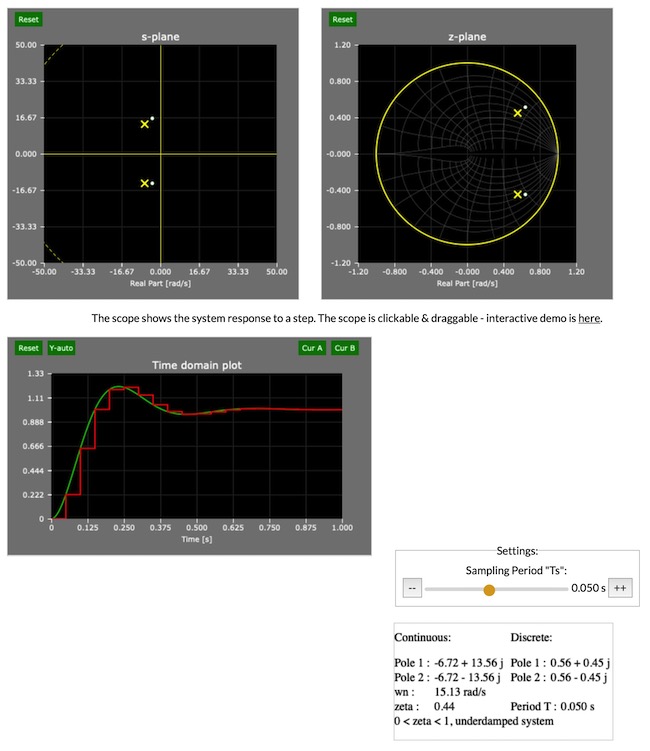
Simulator je napisan u Matlab-u, a
osim položaja polova u s i z ravnini daje i
odziv sustava čija prijenosna funkcija,
odnosno impulsa prijenosna funkcija ima ta
dva pola na pobudu jediničnog skoka. Izgled
akrana za primjer konjugirano kompleksne
polove prikazuje slika 4.2.3a.
Napomena: Prisjetimo se razmatranja o asimptotskoj stabilnosti iz prethodnog poglavlja kada smo kazali da je sustav stabilan ukoliko mu svi polovi leže unutar jedinične kružnice z ravnine. Sada je to pojašnjeno i preko preslikavanja s ravnine u z ravninu. Kontinuirani sustav je stabilan ukoliko mu svi polovi leže na lijevoj strani s ravnine, što u skladu s prethodnim razmatranjem povlači da je diskretni sustav stabilan ukoliko mu svi polovi leže unutar jedinične kružnice z ravnine.
Pogledajmo još kako se neki karakteristični dijelovi s ravnine preslikavaju u z ravninu. Pri tome nas posebno zanimaju oni koji su vezani sa specifikacijama odziva kontinuiranog sustava (vidi Specifikacije odziva u vremenskoj domeni i s području). Posebno nas zanimaju:
a) linije maksimalnog
prebačaja (konstantnog stupnja prigušenja
ζ),
b) linije konstantne
frekvencije prigušenih oscilacija ωP i
c)
linije konstantnog vremena smirivanja na
x% vrijednost tx .
Za definiciju ovih veličina u kontinuiranom području pogledaj poglavlje Specifikacije odziva u vremenskoj domeni i spodručju.
Linija maksimalnog prebačaja je u s ravnini polupravac iz ishodišta koji s negativnim dijelom realne osi zatvara kut β = arc cos(ζ), gdje je ζ stupanj prigušenja. On se kreće od 0 (neprigušeni sustava) do 1 (granično aperiodički sustav). Razlog je taj što jednadžba za proračun maksimalnog prebačaja sustava 2. reda (jednadžba A.2.3. iz Dodatka) ovisi samo o stupnju prigušenja ζ isto kao i kut β. U z ravnini ovaj se polupravac preslikava u spiralu koja počinje u točki 1+j0 i završava u ishodištu. Slika 4.2.4 prikazuje to grafički, a matematički ovo preslikavanje dokazujemo tako da najprije izaberemo točku s=r.ejΦ na polupravcu maksimalnog prebačaja. Sve točke na istom polupravcu će imati isti argument Φ, a amplituda r će se mijenjati od 0 do ∞. Prebacimo se sada u z područje:
![]()
Kako smo u II kvadrantu, Φ se kreće od π/2 do π, pa će se cos(Φ) kretati od 0 do -1, a sin(Φ) od 1 do 0. Amplituda |z| odgovarajuće krivulje u z će ravnini počinjati vrijednošću 1 te padati prema 0, dok će joj argument rasti. Rezultat je spirala prikazana na slici 4.2.4.
Slika 4.2.4. Preslikavanje pravca maksimalnog prebačaja u z ravninu
Pretpostavimo sada
da trebamo projektirati sustav koji ne
smije imati maksimalni prebačaj veći od
16%. U skladu s izrazom za proračun
maksimalnog prebačaja (vidi Specifikacije
odziva u vremenskoj domeni i s
području) tolikom prebačaju
odgovara kut β=±600 pa oba pola
zatvorenog regulacijskog sustava trebaju
u s ravnini pasti u područje omeđeno
pravcima koji s negativnim dijelom
realne osi zatvaraju kut od ±600. U z ravnini tom području odgovara srcolika
površina prikazan na slici 4.2.5. Ova se
krivulja često u inženjerskom žargonu
zove 'srcolika' krivulja.
Slika 4.2.5. Preslikavanje područja u kojem je maksimalni prebačaj manji od 16%
Uobičajeno
je u z ravnini
unutar
jedinične
kružnice
ucrtati
krivulje
stupnju
prigušenja
ζ
koje
odgovaraju
krivuljama konstantnog
maksimalnog prebačaja.
Primjer takvog linija
prikazuje slika
4.2.5a. Njima ćemo se
često vraćati u dijelu
posvećenom sintezi
diskretnog regulatora
metodom GMK (vidi
sliku 4.5.5 na
stranici lekcije 4.5
Geometrijsko mjesto
korjena diskretnih
sustava.
Linija konstantne
frekvencije prigušenih oscilacija je u s ravnini horizontalni
polupravac paralelan s realnom osi. Ona je
ujedno i liniji konstantne periode
prigušenih oscilacija zato
što je TP=2π/ωP
, a kako
je vrijeme maksimalnog prebačaja polovina
periode prigušenih oscilacija, odgovara i
liniji konstantnog vremena maksimalnog
prebačaja Tm.
On se u z ravnini preslikava u radijalne
pravce iz ishodišta z ravnine unutar
jedinične kružnice. Pogledajte sliku 4.2.3
i segmente 2 i 4 za ωP=ωs/2. Za ωP manji od
ωs/2 raditi će se o radijusima koji s realnom osi
zatvaraju kut različit od 0. Na primjer
tražimo li područja u s i z ravnini u
kojima je prigušena frekvencija manja
ili jednaka ωs/3 u s ravnini to će biti područje unutar osnovnog
pojasa, a u z ravnini isječak jedinične
kružnice kod kojega je na rubnim
područjima argument ±2π/3 (zato što je na primjer za pol
u II kvadrantu na  . Slika 4.2.6 prikazuje odgovarajuća
preslikavanja cijelog područja. Linije
konstantne frekvencije prigušenih
oscilacija su radijalne, zrakaste linije
iz ishodišta z ravnine, a dio imaginarne
osi između -ωs/3
i ωs/3
preslikava
se u dio jedinične kružnice, pa je se
sivo područje s ravnine preslikava u dio
jedinične kružnice koji se obično u
inženjerskom žargonu zove 'siroliko'
područje.
. Slika 4.2.6 prikazuje odgovarajuća
preslikavanja cijelog područja. Linije
konstantne frekvencije prigušenih
oscilacija su radijalne, zrakaste linije
iz ishodišta z ravnine, a dio imaginarne
osi između -ωs/3
i ωs/3
preslikava
se u dio jedinične kružnice, pa je se
sivo područje s ravnine preslikava u dio
jedinične kružnice koji se obično u
inženjerskom žargonu zove 'siroliko'
područje.
Slika 4.2.6. Preslikavanje dijela s ravnine u kojoj je ωP≤ωs/3
Linija
konstantnog vremena
smirivanja na x%
vrijednost je u s
ravnini vertikalni
pravac paralelan s
imaginarnom osi. Već
smo ga nacrtali na
slici 4.2.2 Sve točke
na ovom pravcu imaju
isti faktor
prigušenja σ,
a prema jednadžbi
A.2.10. iz Specifikacije
odziva u
vremenskoj
domeni i s
području
i isto vrijeme
smirivanja na
x% vrijednost.
U z ravnini
ovaj pravac se
preslikakava u
kružnicu
unutar
jedinične
kružnice. Za σ
= 0 (vrijeme
smirivanja
beskonačno),
pravac
odgovara
imaginarnoj
osi, pa se
preslikava u
jediničnu
kružnicu, a za
σ
koji je otišao
u - beskonačno
(vrijeme
smirivanja 0)
pravac se
svede na točku
u ishodištu,
što smo već na
početku ovog
poglavlja i
pokazali. Kako
i gornjim
primjerima,
sada se pitamo
gdje u z
ravnini moraju
ležati polovi
diskretnog
sustava da bi
vrijeme
smirivanja na
x% bilo manje
od neke
vrijednosti,
na primjer vrijeme
smirivanja na
2% vrijednost
t2%≤ 2
sekunde
(pogledaj
primjer
ispod). Ova
vrijednost
određuje neki
σ,
a on opet neki
radjus unutar
jedinične
kružnice (za
prethodne
podatke u
primjeru ispod
smo izračunali
da bi taj
radijus trebao
biti oko 0.37.
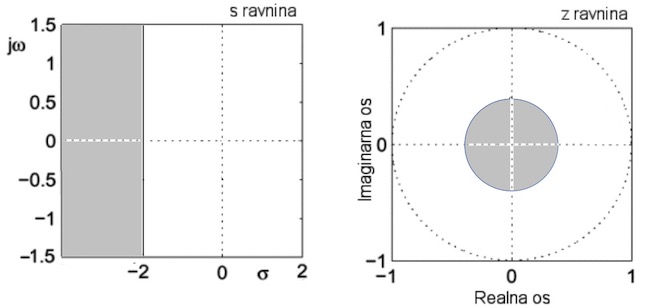
U s ravnini
područje u
kojem je
vrijeme
smirivanja
manje od ovoga
je lijevo od
pravaca, a u z
ravnini unutar
te manje
kružnice kako
zorno pokazuje
slika 4.2.6.a.
Povežimo na kraju ove specifikacije u jednom primjeru:
Primjer
Trebamo projektirati digitalni sustav vođenja tako da odziv zatvorenog regulacijskog sustava (koji je sustav drugog reda) na pobudu jediničnom odskočnom funkcijom zadovoljava sljedeće specifikacije:
a) maksimalni prebačaj MP≤ 16%
b) vrijeme smirivanja na 2% vrijednost t2%≤ 3,9 sekunde.
Nacrtajmo prvo specifikacije u s ravnini. Slučaj za ograničeni maksimalni prebačaj smo imali na slici 4.2.5, a za vrijeme smirivanja od 1,95 sekunde imamo
iz čega slijedi |ζ.ωP|≥2, što je pravac u s ravnini paralelan s imaginarnom osi. Obje specifikacije zadovoljava zatamnjeno područje na slici 4.2.7.
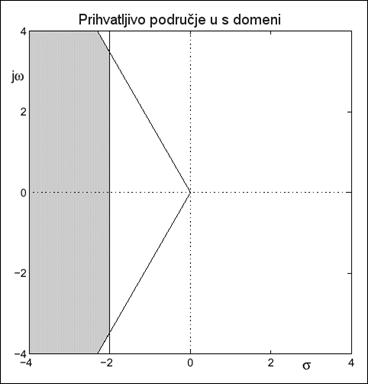
Slika 4.2.7. Specifikacije u s ravnini za sustav drugog reda čiji je prebačaj manji od 16% i vrijeme smirivanja kraće od 2 sekunde
Napomena: ukoliko prijenosna funkcija zatvorenog regulacijskog sustava ima više od dva pola, ili ima nula, onda trebamo paziti da postoje dva pola u zatamnjenom području koje zovemo dominantni polovi, i
a) da su svi ostali polovi ili puno dalje na lijevoj strani s ravnine ili vrlo blizu nulama (poništeni nulama) i
b) sve neponištene nule puno dalje od dominantnih polova.
Vratimo se ponovo na zadatak projektiranja digitalnog sustava vođenja.
Prvo je pitanje izbora frekvencije uzorkovanja. Moramo se osigurati da polovi zatvorenog regulacijskog sustava budu unutar osnovnog pojasa. Pretpostavimo da ih želimo postaviti na sjecište linija β = 60o i σ=-2. Vrijedi ωp = 2 tan(60o)= 2 √3 rad/s ≈ 3.4 rad/s.
Pretpostavimo da želimo imati kružnu frekvenciju uzorkovanja ωS bar 3 puta veću od kružne frekvencije prigušenih oscilacija ωp, znači veću od 6√3 rad/s ≈ 10.4 rad/s. Zbog jednostavnijeg računa izaberemo ωS =4π rad/s, pa je period uzimanja uzoraka T=2π/ωS = 2π/4π = 0.5 sekundi.
Da bi polovi u z ravnini zadovoljili specifikacije s ravnine trebaju zadovoljiti sljedeće uvjete:
a) Trebaju biti unutar srcolike površine definirane sa ζ =0.5
b) Trebaju biti unutar kružnice radijusa |z|=e-2T ≈ 0.37 kako bi se zadovoljio zahtjev |σ| ≥ 2;
c) I treće, argumenti polova trebaju biti manji od ± 2π/3 kako bi frekvencija prigušenih oscilacija bila bar tri puta manja od frekvencije uzorkovanja (vidi sliku 4.2.6).
Konačni je rezultat slika 4.2.8.
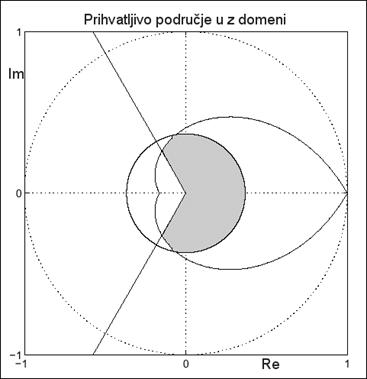
Slika 4.2.8. Specifikacije u z ravnini za sustav drugog reda čiji je prebačaj manji od 16%, vrijeme smirivanja kraće od 2 sekunde i ωS/ωp = 3
Napomena: Zahtjev da frekvencija uzimanja uzoraka bude 3 puta veća od frekvencije prigušenih oscilacija nije dovoljan. O tome smo detaljnije govorili u poglavlju 2.2.6. ωS bi trebao biti najmanje 16 puta veći od ωp. Ukoliko povećamo frekvenciju uzorkovanja srcolika forma ostaje neizmijenjena, ali se kružnica definirana vremenom smirivanja povećava.